在2026年的人形机器人行业,技术路线与战略方向的分化正日益显著。部分企业聚焦于提升机器人的运动性能,试图通过更快的奔跑速度、更高的跳跃高度或更具视觉冲击力的演示视频吸引公众目光;另一类企业则选择深耕底层技术,致力于让机器人具备更强的智能与自主决策能力。前者往往能快速获得市场关注,而后者虽面临更高挑战,却可能更接近行业发展的终极目标。
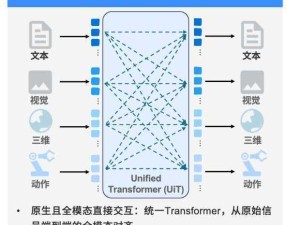
6月16日,星海图举办全球开发者大会,一口气推出多项核心成果:新一代VLA基础模型G0.5、世界模型Fast-WAM、全身控制基础模型,以及双足人形机器人Kengo。同时,公司宣布启动“100万小时真实数据计划”,并与亦庄合作成立“亦数智能”,旨在构建覆盖动作、对象、场景、本体四个维度的超高质量数据体系。这一系列动作被外界视为星海图在模型、硬件、数据与生态领域的全面布局,但其创始人高继扬却强调,这并非简单的技术展示,而是一场以“持续进化”为目标的“无限游戏”。
高继扬对星海图的定位是“具身大脑企业”。在他看来,机器人整机、供应链、数据与开发者生态均服务于具身智能基础模型的迭代。这一逻辑与多数同行形成鲜明对比:例如,以运动能力见长的宇树科技已在开发者市场、展演娱乐领域占据领先地位,但高继扬认为,当前机器人行业真正成熟的市场仍局限于开发者、科研教育与娱乐场景,面向生产力的核心市场尚未展开。他直言:“卖出一批机器、做出一个爆款视频,这些都是有限游戏;让机器人持续获取真实数据、迭代模型、进入真实场景,最终形成‘越用越聪明’的系统,才是无限游戏的目标。”
在技术路径上,星海图的选择显得“反潮流”。当行业热议仿真数据、合成数据或类脑计算时,高继扬坚持“百万小时真实数据”的必要性。他指出,仿真环境无法完全复现物理世界的摩擦力、光照变化与操作手感,而具身智能的突破必须依赖真实数据。为此,星海图通过“亦数智能”项目,系统性采集动作、对象、场景与本体数据,试图构建机器人行业的“数据飞轮”。高继扬解释:“机器人需要知道‘用什么身体、在什么场景、操作什么对象、完成什么动作’,这四个维度的数据覆盖越全面,机器人的泛化能力越强。”
双足人形机器人Kengo的发布,是星海图战略的又一关键落子。高继扬坦言,公司研发双足机器人并非为了“模仿人类”,而是因为非结构化场景(如家庭、工厂)需要类似人类的身体结构才能进入。他强调:“先造出扎实的身体,再通过真实场景采集数据,最后用数据训练大脑——这条路虽慢且重,但能形成长期竞争力。”这种“造身体、结硬寨、打呆仗”的思路,与曾国藩“在现实约束中拿结果”的成事逻辑一脉相承。高继扬认为,机器人行业需要既能整合技术,又能组织团队、协调资源的“战略型实用主义者”。
尽管星海图的路线获得部分认可,但其挑战亦不容忽视。作为双足机器人领域的追赶者,公司需证明Kengo能在真实场景中长期稳定运行;真实数据虽被视为核心资产,但如何筛选有效数据、避免“数据噪声”仍是难题;更关键的是,从开发者市场迈向生产力市场需跨越“稳定干活、降低成本、持续付费”三重门槛,这并非技术突破所能单独解决。然而,这些挑战恰恰印证了星海图的战略选择——在长链条、重交付、慢验证的领域中,底层能力才是决定胜负的关键。