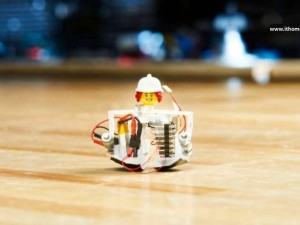
卡内基梅隆大学的研究团队近日宣布了一项令人瞩目的成就:他们成功研发出世界上最小的独立运作双足机器人,这个小家伙被亲切地命名为“Zippy”。尽管身高不足3.8厘米,Zippy却凭借内置的电池、驱动器和控制系统,展现出了惊人的运动能力。
在机械工程学教授Aaron Johnson和Sarah Bergbreiter的共同领导下,这项研究旨在探索微小尺度下的运动机制,为未来微型行走机器人的发展奠定基础。Zippy不仅能够从静止状态迅速启动,还能以超过每小时0.8公里的速度行走,甚至能够灵活转向、跳跃以及攀爬小台阶。
Johnson教授表示,双足机器人在应对不平坦地形和绕过障碍物方面,相比轮式机器人具有显著优势。因此,他们一直致力于简化行走机构,使简单的双足机器人成为可能。而Zippy的出现,正是这一努力的结晶。
研究的主要作者之一Steven Man将在即将召开的IEEE国际机器人与自动化会议上展示这一成果。他强调,微型足式机器人的复杂性及其潜在应用具有重要意义。Zippy能够进入人类和其他机器人难以触及的狭窄空间,为紧急搜救、工业检查以及地质科学研究等领域带来新的可能性。
Zippy的行走机制独特而高效。它通过抬起前腿并将重心前移来产生动量,结合其圆形的脚部设计,为另一条腿的摆动提供了足够的空间。由于其微小的尺寸,Zippy没有采用伺服系统来限制髋关节的活动范围,而是巧妙地利用机械硬止动块来实现关节限位。
Bergbreiter教授指出,Zippy的微小尺寸和团队进行的机械调整使其能够以惊人的速度行走。具体来说,Zippy的行走速度相当于其腿长每秒10倍,这相当于一个成年人以每小时30.6公里的速度移动。因此,按照这一衡量标准,Zippy不仅是最小的动力自主双足机器人,还是速度最快的。